The main theme this week is remembering how we got here – and welcoming a new generation of APL users. There are three talks and a panel discussion looking back on careers spent working on or with APL, and a final panel discussion with members of the new generation, which will hopefully wipe away some of the nostalgia.
John Daintree’s presentation Array Notation: A Journey of Discovery is the exception from the historical theme – the release was delayed until this week due to technical difficulties. However, John does point out that it is nearly a full decade since Phil Last’s initial APL Array Notation presentation at Dyalog ’15 in Sicily, and that Adám Brudzewsky has subsequently given several overviews of the evolution and experimental use of the notation (Literal Notation for Arrays and Namespaces at Dyalog ’17, Array Notation Mk III at Dyalog ’18, and Array Notation RC1 at Dyalog ’20). As Chief Architect at Dyalog Ltd, John has been working on the implementation of array notation within the Dyalog interpreter and IDE, and offers a sneak peek at array notation features that will be in version 20.0 – and some that are probably too adventurous to make it this time.
Veli-Matti Jantunen inherited reasponsibility for PxEdit when the original author decided to join FinnAir as a pilot. (Kimmo Linna is now an Airbus 350 Captain but still finds time to contribute tools to the Dyalog community – for example, RSConnect). In PxEdit to GitHub – Refurbishing a Seasoned APL Application to Open Source, Veli-Matti explains that PxEdit was originally a temporary hack for handling larger-than-usual tables at Statistics Finland, but it grew in popularity as Veli-Matti added functionality that users needed (like Unicode support). To cater to users in developing countries, Veli-Matti avoided using system features that would require the newest versions of operating systems, doing a lot of work in “raw APL” instead. 25 years later, PxEdit is used by 115 organisations in 45 different countries. Veli-Matti’s next task is to make it open source on GitHub, in the hope that a new person will pick it up so that he can retire!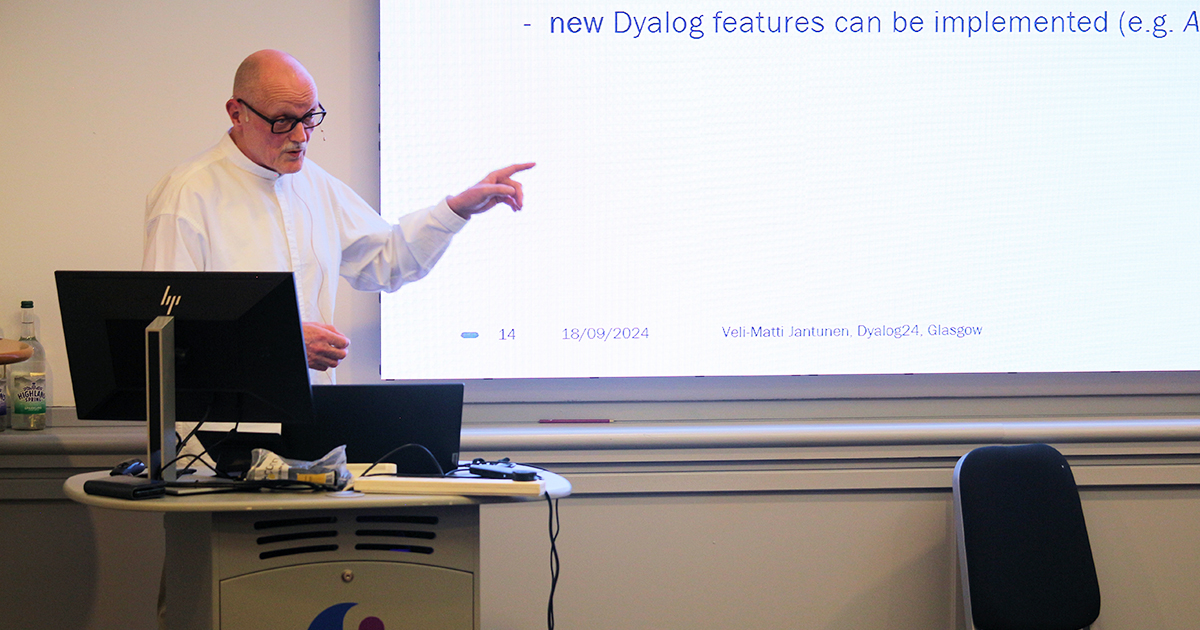
The next retrospective presentation is Charles Brenner’s Some APL Pioneers that I Knew. If you are interested in the history of programming languages and the personalities behind languages like APL, this highly entertaining talk is a treat. On his way, Charles met, or worked with, Larry Breed, Kenneth Iverson, Eugene McDonnell, Adin Falkoff, Garth Foster, Curtis Jones, and Paul Berry – to name a few. Charles’ sense of humour is extra dry, so listen carefully to pick up several jokes that the audience did not get quickly enough to laugh during the presentation…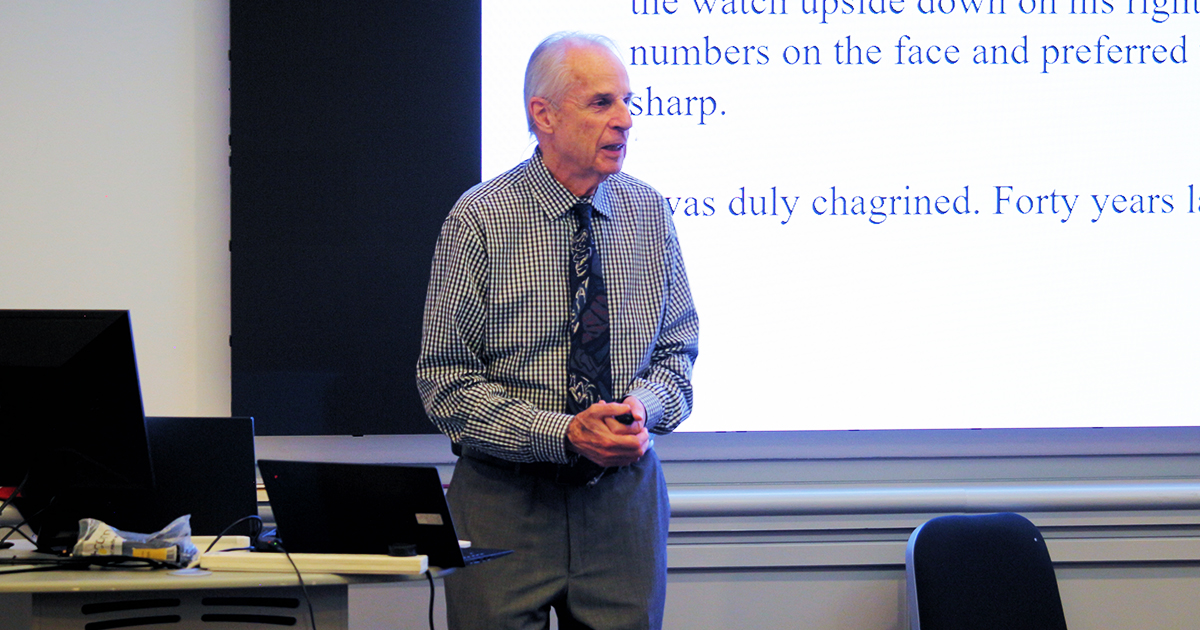
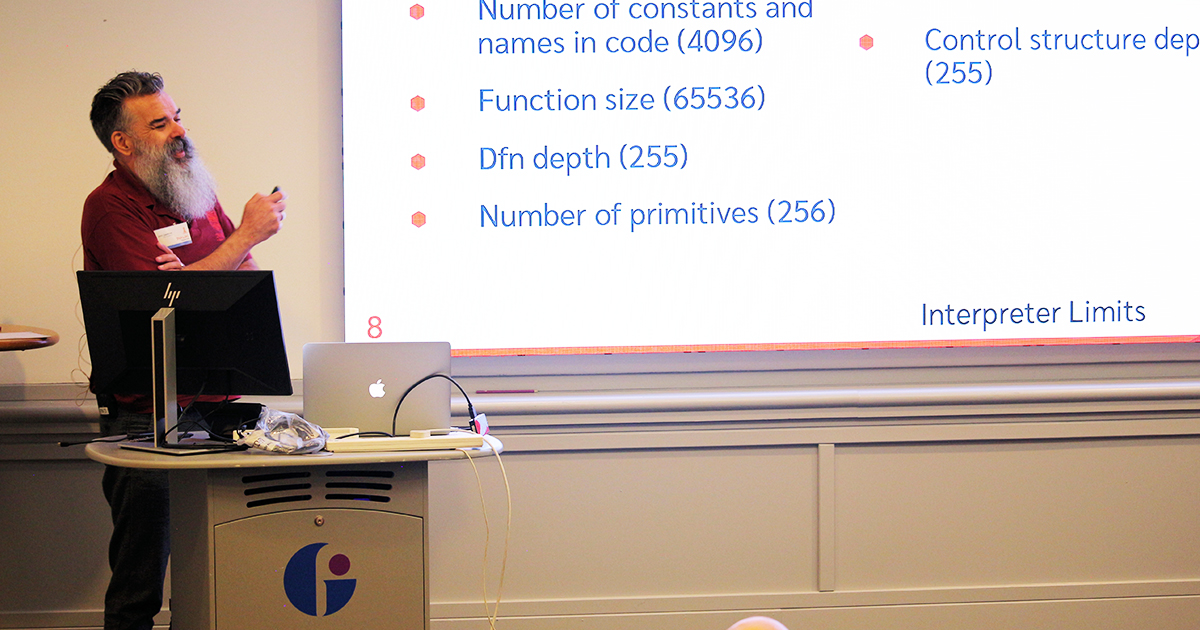
Geoff Streeter worked on Dyalog APL from the day it was conceived in 1981 until he retired 18 months ago. Key Technical Decisions During the Development of Dyalog APL is a walk through the history of the implementation and critical decisions made, starting with: Should we use C or Assembly Language? Target UNIX? Build a 1st generation (flat) or 2nd generation (nested) interpreter? Should it include productivity tools like ⎕FMT, and if so from which pre-existing APL interpreters? In his own words, expect some nostalgia, some repentance, some triumphalism, and some serendipity. Thankfully, many of those early decisions turned out to be excellent. None of us would have been in Glasgow in September 2024, more than four decades after the release of Dyalog version 1.0, if it had not been for Geoff!
Finally, Stephen Taylor wraps up the historical theme as the host of two panel discussions. In Let’s Put the Future Behind Us, we hear from the team who nursed the company and the product from a very shaky birth, where the company was reconstructed more than once – Pete Donnelly explains how he mortgaged his own house because he believed in the future of the product! Geoff Streeter worked without pay at times, but explains that he was not concerned as he abdicated worrying to management. Andy Shiers remembers how the sales of IBM hardware to British Airways helped pay for continued work on APL. Just past the halfway point in Dyalog Ltd’s current history (this is hard for me to fathom), Pete handed the baton to Gitte Christensen, who tells the story of how she fell in love with APL and “came home” in 2005 to take over the helm of a language vendor after starting her career at one of the original APL vendors, I. P. Sharp Associates (IPSA).
However, we cannot end a Dyalog user meeting looking back! In The New Breed Plugs In, Stephen asks Martina Crippa, Josh David, Sandra Persson, and Gilgamesh Athoraya how they found APL (or how APL found them, as some of them put it). What attracted them to APL? Beauty, having fun, and creativity seem to be important components of many explanations, but I should not say more – listen to the stories!
——————————————
This week’s videos:
- D03: Array Notation: A Journey of Discovery (John Daintree)
- U13: PxEdit to GitHub – Refurbishing a Seasoned APL Application to Open Source (Veli-Matti Jantunen)
- U14: Some APL Pioneers I Knew (Charles Brenner)
- U15: Key Technical Decisions During the Development of Dyalog APL (Geoff Streeter)
- U16: Let’s Put the Future Behind Us (Panel Discussion) (Stephen Taylor with Gitte Christensen, Pete Donnelly, and Geoff Streeter)
- U17: The New Breed Plugs In (Panel Discussion) (Stephen Taylor with Gilgamesh Athoraya, Martina Crippa, Josh David, and Sandra Persson)
Materials for all presentations can be downloaded from the Dyalog ’24 webpage.
 Follow
Follow

















 As usual, the Dyalog user meeting opened with presentations by the CEO and CTO, who provided statements of direction for our technical and marketing activities. As mentioned in
As usual, the Dyalog user meeting opened with presentations by the CEO and CTO, who provided statements of direction for our technical and marketing activities. As mentioned in